Antes que nada, sigo vivo. Este tiempo he estado haciendo diferentes pruebas. Que si calibrando la velocidad de los motores del nuevo pato, concordar velocidades entre ellos, pruebas sobretodo de comunicación vía radio y alguna cosa más. Pero nada que haya supuesto un gran cambio.
Pero el otro día me viene el tutor, y me comenta que la placa de control (la que lleva el PIC y la mayor parte de la circuitería) se podría modificar para ajustarla a nuestras necesidades, quitarle partes que no usamos y cosas así.
Por una parte bien, la podré dejar a mi gusto y la podré aprovechar mejor. Pero por otra parte va a ser un tema que me va a complicar un poco, no mucho, pero sí lo suficiente como para echar unas gotas de sudor.
Voy a explicar un poco como va el tema de montar los circuitos en placa para que me entendáis. Una placa normalmente (y para simplificar las cosas) tiene dos capas: la capa superior o de componentes, y la capa inferior o de soldadura. Los nombres son bastante descriptivos. En la capa superior es donde se depositan los componentes, y por la capa inferior es donde se hacen las soldaduras para unir los componentes a la placa y a las pistas.
Hacer el montaje es bastante sencillo, se meten las patillas de los componentes por los agujeros hechos en la placa (por la parte de arriba), y se aplica soldador y estaño en cada patilla (por la parte de abajo). Este método es bastante sencillo, al aplicar las soldaduras por la capa donde no hay nada que moleste hace que la tarea sea bastante fácil. Pero esto sólo se puede hacer así en placas fabricadas de forma profesional (por llamarlo de alguna manera). Una como esta:
En este tipo de placas, las pistas que van por la cara superior y a través de un agujero pasan a la capa inferior, están completamente conectadas. El agujero está recubierto interiormente por material conductor.
Esto hace que una pista tenga continuidad aunque pase de una capa a otra. Además, al realizar la soldadura, permite que el estaño fundido pase de una capa a otra a través del agujero creando una soldadura de mejor calidad.
Hasta ahí bien.
En el caso de los patos, para hacer prototipos, usamos otro tipo de placas. Se coge una placa virgen de fibra de vidrio recubierta de cobre por los dos lados (como si cogiérais un trozo de cartón y lo pintáseis primero por un lado y después por el otro). Esta placa se coloca en una fresadora, y ésta dibuja el circuito cortando cobre. Algo parecido a ésto:
Al acabar con una cara, hay que darle la vuelta a la placa y repetir por la otra cara (si el circuito tiene pistas por las dos caras).
Con este tipo de placas, no existe continuidad en una misma pista que pasa de una capa a la otra. Sólo hay conductor en la superficie de la placa, no dentro de los agujeros. Esto hace que si una patilla tiene la pista asociada en la cara superior, haya que soldar por esa misma cara. Si tiene la pista asociada en la cara inferior, pues lo mismo. Y si tiene pista en ambas caras, hay que realizar dos soldaduras. Por la cara inferior sigue siendo igual de fácil hacer una soldadura, no hay ningún problema. El problema está en la cara superior. Cuando ya tienes varios componentes, se empieza a hacer difícil meter la punta del soldador para soldar con comodidad, y en componentes que van a ras de circuito (como por ejemplo conectores) es literalmente imposible soldar por la cara superior, al quedar la patilla escondida bajo el aislante del mismo componente. En estos últimos casos se puede desmontar, soldarlo como toca, y volver a montarlo una vez ya soldado.
Otro inconveniente que tienen este tipo de placas es si tienes que corregir errores y realizar dessoldaduras. En una placa convencional, aplicas el dessoldador por la capa inferior, se calienta todo el estaño y lo retiras con la bomba de succión, que encaja perfectamente en la patilla (el dessoldador no es más que un soldador con un agujero en la punta para encajar en la patilla y por donde se retira el estaño fundido). En nuestro caso, no basta con aplicar el dessoldador por la cara inferior, sino que también lo tenemos que hacer por la superior, y ahí el dessoldador ya no sirve, ya que no se puede colocar de manera que funda y retire el estaño a la vez. Ahí ya depende un poco de como sea el componente a cambiar y de la facilidad de acceso que haya para hacerlo de una manera o de otra. Sin contar que el cobre no tiene una fijación muy resistente a la placa de fibra, y es posible que al retirar componentes se levante parte de la pista, teniendo que solucionarlo con alguna chapuza.
¿Y a qué venía todo esto? Sí, que tengo que modificar la placa de control principal, que está llena de componentes y de pistas bastante finas. Y antes de mandarla a fabricarla de forma profesional, tengo que hacer algunos prototipos para ver que funcionará correctamente. Vamos, que me voy a hartar a hacer soldaduras en un tipo de placa que en principio está pensada para montar circuitos sencillos de pistas anchas.
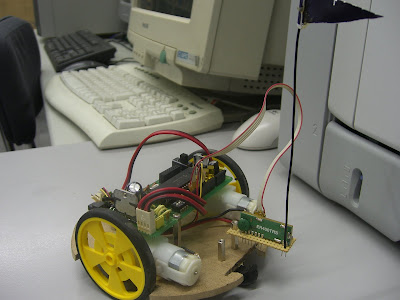
Aquí tenéis al próximo en la familia. Poco le falta para empezar a andar. Aunque su hermano está haciendo de donante. Como todavía estamos en pruebas, y no tengo material para fabricar más patos, he usado partes del segundo pato para ir montando éste.
Bonito verdad?
Y aquí el circuito final que me permite comunicarme desde el PC con los patos. Ahora sólo me sirve para controlarlos, pero para cuando se comuniquen entre ellos, me servirá para ver qué se dicen, y si es necesario para controlar alguno de forma manual.
Ale, hasta la semana que viene, que me voy de fiesta por el norte.
A ver, que últimamente tengo esto bastante olvidado. Os presento al nuevo objeto de estudio, el ER400TRS.
Básicamente es un conversor de medios. Lo que le llega por cable mediante RS-232 lo transmite directamente, y cualquier otro ER400TRS que esté dentro del rango lo recibe y lo transmite por RS-232 al dispositivo al que esté conectado. Aquí podeis ver el datasheet.
La primera prueba ha consistido en poner un enlace RF en uno de los patos y programarlo para que sea completamente tonto. Antes no es que fueran muy listos, pero al menos tenían iniciativa. Para la prueba está programado para recibir y ejecutar órdenes. El otro enlace RF se ha puesto en el ordenador, y desde éste se mandan las órdenes.
Esto es una versión provisional para hacer pruebas, no tiene ni sensores de IR, ni de temperatura ni tiene los LEDs traseros. Sí conserva el sensor de distancia, por si acaso. La antena es de diseño propio xD. Se puede mejorar bastante el diseño de la antena, haciéndola integrada con la placa de la circuitería, pero por ahora va a seguir así.
En el siguiente vídeo se puede ver el pato controlado desde el ordenador. Mucho interés no tiene, ya que simplemente se ve al pato dando vueltas. El modo de control es bastante sencillo, simplemente se envía un carácter al pato y éste se mueve de una u otra manera. Los carácteres usados han sido:
QWE ASD ZXC
W y X hacen avanzar o retroceder al pato. S lo detiene. A y D hacen que gire sobre sí mismo, moviendo las ruedas a la misma velocidad pero en sentidos diferentes. Q, E, Z y C hacen que gire sobre una rueda hacia adelante o hacia atrás. Todo bastante sencillo.