Pos ale, después de vete a saber cuánto tiempo sin pasar por aquí, allá van un par de vídeos de cómo los patos se colocan en fila.
Ale, a ver si un día hago un par más en condiciones de cómo se siguen.
viernes, 5 de diciembre de 2008
jueves, 17 de julio de 2008
Patos: La Película
Bueno, no deja de ser otro vídeo corto, nada espectacular, y poco representativo del trabajo de estas últimas semanas (o meses).
A la vista hay pocas novedades sobre lo que ya hacían hace tiempo, Juanito me sigue y Jorgito siguiendo a Juanito. El trabajo está detrás de eso, a nivel de comunicación y de organización.
En el vídeo están inicialmente en reposo. Al detectar Juanito que una persona está delante suyo un tiempo, le dice a Jorgito que se ponga detrás. Jorgito busca, y una vez que ya está colocado, se ponen los dos a seguir a la persona.
- Y pa eso tanto rollo y tanto tiempo?
- Pozí.
- Pues vaya mi*rda.
- Ya, es lo que hay.
Ale. Si un día de estos me aburro intentaré hacer un vídeo con los tres y algo más largo.
miércoles, 16 de julio de 2008
Esto ya se acaba
O eso parece. Los patos ya están montados y funcionando del todo. Incluso con su nuevo traje. Llamémosle traje o llamémosle disfraz, que todavía no lo tengo muy claro.
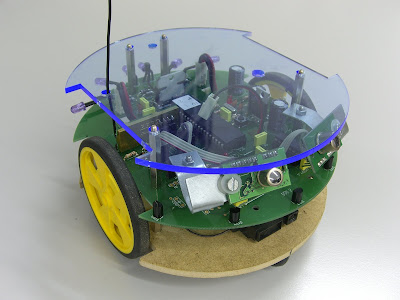
Aquí Juanito, con traje azul.
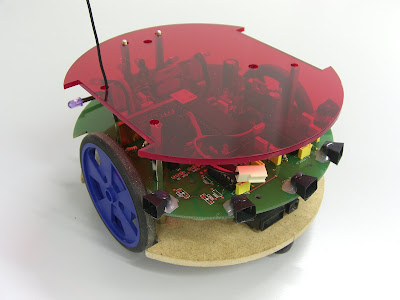
Aquí Jorgito, con traje rojo.
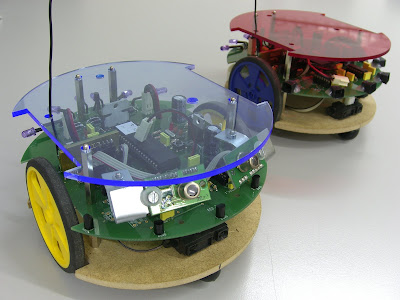
Y aquí los dos.
Jaimito está desguazado, que ha servido de plantilla para rehacer los agujeros de las demás bases de madera.
El que haya uno azul y otro rojo ahora sólo es de cara a ver como quedaba el montaje. Al final, al ser 20 patos, habrá 10 de cada color.
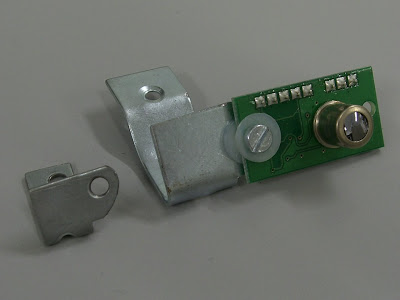
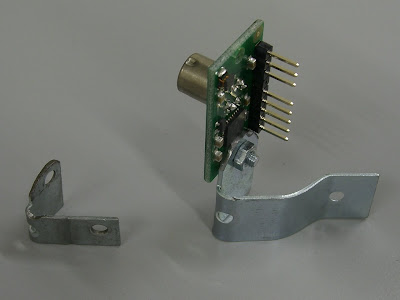
Una pega que hemos tenido al probar la tapa esta, es que bloquea la radiación IR proveniente del calor, por lo que con el montaje anterior los sensores de temperatura no veían nada de nada (quedaban debajo de la tapa). Otra pega es que la tapa golpeaba con los sensores.
Pero bueno, no ha sido nada grave y se ha solucionado haciendo unos nuevos soportes para los sensores. A la izquierda el antigo, y a la derecha el nuevo con el sensor ya montado.
Y ya que estamos, comentar que se prepara un parto multitudinario, aunque esto ya no es cosa mía.
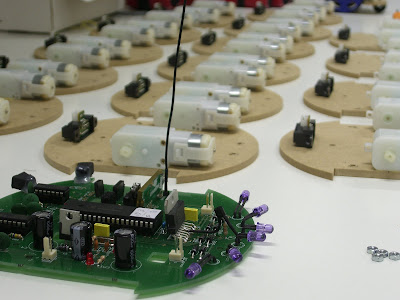
Ahí esta el pobre Jaimito desprovisto de sus patas, al lado de los que serán sus futuros hermanos.
Y ale, por hoy ya está. A ver si mañana hago un par de vídeos con las criaturas funcionando como toca.
Aquí Juanito, con traje azul.

Aquí Jorgito, con traje rojo.

Y aquí los dos.

Jaimito está desguazado, que ha servido de plantilla para rehacer los agujeros de las demás bases de madera.
El que haya uno azul y otro rojo ahora sólo es de cara a ver como quedaba el montaje. Al final, al ser 20 patos, habrá 10 de cada color.
Una pega que hemos tenido al probar la tapa esta, es que bloquea la radiación IR proveniente del calor, por lo que con el montaje anterior los sensores de temperatura no veían nada de nada (quedaban debajo de la tapa). Otra pega es que la tapa golpeaba con los sensores.
Pero bueno, no ha sido nada grave y se ha solucionado haciendo unos nuevos soportes para los sensores. A la izquierda el antigo, y a la derecha el nuevo con el sensor ya montado.


Y ya que estamos, comentar que se prepara un parto multitudinario, aunque esto ya no es cosa mía.

Ahí esta el pobre Jaimito desprovisto de sus patas, al lado de los que serán sus futuros hermanos.
Y ale, por hoy ya está. A ver si mañana hago un par de vídeos con las criaturas funcionando como toca.
lunes, 7 de julio de 2008
La cosa ya se define (incluso los nombres)
Aquí va el primer vídeo de las pruebas en grupo.
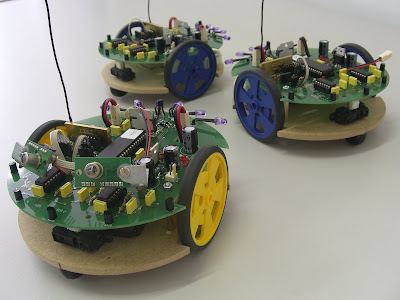
Estos son los tres patos de las pruebas. El de arriba a la derecha es el principal, el que va a ser el primero de la fila, el de la izquierda es el segundo, y el de abajo a la derecha es el tercero.
Como tres son los patos de pruebas, tres son los nombres que hacen falta. Al final ni votaciones ni nada. Los nombres, a dedo. Juanito para el primero, Jorgito para el segundo, y Jaimito para el tercero. Y el PC con el que se comunican se va a llamar Tío Gilito. Ta claro, no? Si hay alguien perdido esta imagen debería ayudarle.

El orden de acontecimientos (por llamarlos de alguna manera) es el siguiente:
- Al ponerse en marcha Juanito, Jorgito y Jaimito, le dicen al Tío Gilito que ya están activos.
- Tío Gilito les manda unos parámetros de búsqueda (o no).
- Tío Gilito avisa a Juanito para que empiece a formar la fila.
- Juanito avisa a Jorgito para que le empiece a buscar.
- Jorgito se pone a hacer el tonto (las vueltas que hacia atrás sobre una rueda no tienen sentido) y después se pone a buscar. Describe curvas demasiado pequeñas, pero está buscando al fin y al cabo según parámetros que le haya mandado el Tío Gilito.
- Jorgito ve a Juanito y se va acercando con cuidado.
- Jorgito avisa a Juanito cuando ya está posicionado y le dice al Tío Gilito cuánta señal de los LEDs de IR está recibiendo.
- Juanito avisa a Jaimito para que empiece a buscar a Jorgito.
- Jaimito se pone a buscar, también según parámetros. En este caso camina bastante recto hasta encontrar un obstáculo o encontrar a Jorgito.
- Jaimito ve a Jorgito y se va acercando con cuidado.
- Cuando Jaimito se posiciona detrás de Jorgito, avisa a Juanito y le manda al Tío Gilito cuánta señal de los LEDs IR está recibiendo.
Hasta aquí es lo que sucede en el vídeo. Realmente pasan bastantes más cosas, esto es un poco resumido. A partir de aquí puede repetirse la situación, desordenándose los patos para volver a montar la fila (para realizar estudios de tiempos y qué parámetros son mejores o peores), o puede ponerse en marcha la fila siguiendo a una persona.
Au, por hoy ya vale.
Au, por hoy ya vale.
martes, 1 de julio de 2008
Más chapuzas
Y espero que esta sí que sea la última.
Ayer me puse a probar los sensores de temperatura y los de IR, que hacía mucho tiempo ya que los tenía abandonados. Con los de temperatura tengo un pequeño problema, y es que ahora con el calor les cuesta distinguir una persona sobre el fondo. En el laboratorio donde hay aire acondicionado funcionan perfectamente, pero en el pasillo donde hago las pruebas y no hay climatización ya se pierden un poco.
Pero el problema gordo ha venido con los sensores de IR. Los valores que daban eran completamente inrestables, pero sólo cuando el sensor de distancia estaba conectado. Con el sensor de distancia desconectado funcionaban perfectamente. Aquí se puede ver lo que pasa.
Ayer me puse a probar los sensores de temperatura y los de IR, que hacía mucho tiempo ya que los tenía abandonados. Con los de temperatura tengo un pequeño problema, y es que ahora con el calor les cuesta distinguir una persona sobre el fondo. En el laboratorio donde hay aire acondicionado funcionan perfectamente, pero en el pasillo donde hago las pruebas y no hay climatización ya se pierden un poco.
Pero el problema gordo ha venido con los sensores de IR. Los valores que daban eran completamente inrestables, pero sólo cuando el sensor de distancia estaba conectado. Con el sensor de distancia desconectado funcionaban perfectamente. Aquí se puede ver lo que pasa.
La linea amarilla es la representación del voltaje de salida de un sensor de IR, justo antes de llegar al PIC. Durante la primera mitad del vídeo, es cuando funciona correctamente, la tensión varía a la vez que giro un pato para que reciba más o menos IR, y la señal se mantiene constante (a excepto de las variaciones provocadas, claro). A partir del segundo 24 es cuando conecto el sensor de distancia, no hace falta aclarar mucho más. Esas oscilaciones provocan que las lecturas a veces sean más, a veces menos y a veces las correctas. Pero no te puedes fiar de ninguna manera.
Esta situación además, sólo se da con las dos últimas versiones de las placas (la definitiva y el prototipo anterior).


Con la placa anterior no sucede este problema.

El problema viene por la distribución de pistas, que hace que el consumo del sensor de distancia afecte a los sensores. Redibujando las pistas de tierra, separando las de los sensores de IR y la del sensor de distancia (separando a partir de un origen común, que siguen siendo la misma pista al fin y al cabo) el problema se soluciona.
Si en su día hubiera visto el problema, la solución habría sido tan fácil como redibujar las pistas, sencillo y elegante. Pero como me he dado cuenta tarde, con las placas ya fabricadas y a medio montar, la solución es la siguiente ñapa.
Por un lado cortar una pista (en el centro de la imagen, la pista que va de arriba a abajo).

Y por otro lado llevar la linea de masa por otro lado.

Espero no haberme dejado nada por corregir, que encontrarme cosas así a estas alturas no hace mucha gracia.
sábado, 28 de junio de 2008
Por mucho trabajo se tenga
uno es capaz de aburrirse sin ningún problema. Es una de esas situaciones en las que no sabes bien por dónde empezar todo lo que tienes que hacer, y acabas haciendo cualquier otra cosa.
Bien, pues aquí el resultado de hoy.
Bien, pues aquí el resultado de hoy.
Vale, ya me pongo a currar
viernes, 27 de junio de 2008
Pues parece que ya está
Fora nirvis, que no es que haya terminado del todo. Parece que ya está que no tengo que hacer ningún pato más. Al final he fabricado cuatro patos definitivos y medio. Tres me los quedo temporalmente para hacer las pruebas finales, otro se lo queda el tutor para hacer unas pruebas de estabilidad para cosas que le quiere montar encima (ni idea, algo con luces), y el otro medio es sólo la placa del circuito que servirá como modelo para que un becario fabrique los que faltan.
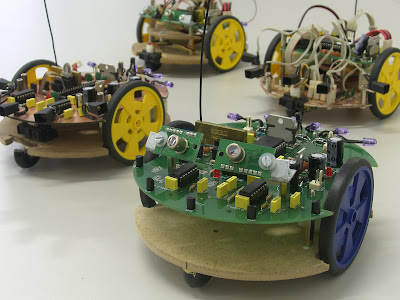
Pondría una foto de toooooda la familia, pero como el primero de los patos definitivos desapareció (fue el que cogió el tutor), allá va una foto con los otros tres.
Faltan los capuchones para proteger los sensores de IR. A ver si un día de estos los hago y los pongo ya de forma fija.
En principio ahora ya por delante sólo queda retocar comportamientos de los patos, formas de comunicarse, control de errores en la comunicación y seguramente detalles en la parte de seguimiento, que hace tiempo que la tengo olvidada. No sé si decir que falta poco o no. En principio parece que mucho no falta, pero tocando tocando el tema se puede hacer gordo, así que ya veremos.
Au
Pondría una foto de toooooda la familia, pero como el primero de los patos definitivos desapareció (fue el que cogió el tutor), allá va una foto con los otros tres.

Faltan los capuchones para proteger los sensores de IR. A ver si un día de estos los hago y los pongo ya de forma fija.
En principio ahora ya por delante sólo queda retocar comportamientos de los patos, formas de comunicarse, control de errores en la comunicación y seguramente detalles en la parte de seguimiento, que hace tiempo que la tengo olvidada. No sé si decir que falta poco o no. En principio parece que mucho no falta, pero tocando tocando el tema se puede hacer gordo, así que ya veremos.
Au
jueves, 26 de junio de 2008
Chapucillas
Las versiones actuales de los patos ya son las definitivas, aunque todavía tienen algún fallo. El problema es descubrir este fallo después de haber pedido las placas definitivas, por lo que se debe solucionar dentro de las posibilidades, sin dejar un pegote en en la placa, y sin poder modificarla.
El tema es que los LEDs traseros se deben poder encender y apagar a voluntad. En los prototipos los tenía constantemente encendidos, conectados directamente a la alimentación. Pero para el diseño de la placa tuve en cuenta que se debían poder encender y apagar, aunque no llegué a probar este diseño antes de pedir las placas definitivas. Fallo.
Al hacer después la prueba, vimos que el PIC no es capaz de dar la intensidad necesaria para alimentar los LEDs, así que tocaba modificar y arreglar sobre la placa. La solución pasa por poner un transistor a modo de interruptor (comparación bruta para aclararlo un poco, sería como poner un relé).
A continuación se puede ver el pegotillo que queda después de solucionar el problema.
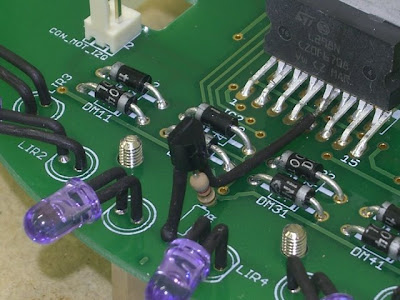
Con el serigrafiado blanco se puede ver como tenía que ser el original, con una resistencia ahí en medio y ya. Con el apaño, un transistor (el trozo plástico negro que hay en el centro), una resistencia, y un trozo de cable que va a al punto más cercano de donde sacar alimentación (en este caso el pin de alimentación del L298).
No deja de ser un pegote, pero al menos no desentona mucho.
El tema es que los LEDs traseros se deben poder encender y apagar a voluntad. En los prototipos los tenía constantemente encendidos, conectados directamente a la alimentación. Pero para el diseño de la placa tuve en cuenta que se debían poder encender y apagar, aunque no llegué a probar este diseño antes de pedir las placas definitivas. Fallo.
Al hacer después la prueba, vimos que el PIC no es capaz de dar la intensidad necesaria para alimentar los LEDs, así que tocaba modificar y arreglar sobre la placa. La solución pasa por poner un transistor a modo de interruptor (comparación bruta para aclararlo un poco, sería como poner un relé).
A continuación se puede ver el pegotillo que queda después de solucionar el problema.

Con el serigrafiado blanco se puede ver como tenía que ser el original, con una resistencia ahí en medio y ya. Con el apaño, un transistor (el trozo plástico negro que hay en el centro), una resistencia, y un trozo de cable que va a al punto más cercano de donde sacar alimentación (en este caso el pin de alimentación del L298).
No deja de ser un pegote, pero al menos no desentona mucho.
domingo, 22 de junio de 2008
A por los definitivos
Esta semana recibimos las placas para montar los circuitos.
Y días más tarde recibimos las bases de madera.

Entre eso y todos los componentes que ya teníamos o que justo también acabamos de recibir ya podemos empezar a montar los patos definitivos.
Con las bases de madera hay que trabajar un poco, pero nada grave. Los agujeros que han hecho están desplazados, unos más y otros menos. En la siguiente foto se puede ver una mancha blanca (agujero que se ha tapado) y un agujero al lado en la posición buena.

El error de los agujeros no es muy grande (el de la foto es el que más, en los otros la diferencia es menos hasta solapar), pero es suficiente para hacer que la placa del circuito quede desplazada y rotada sobre la base de madera. Esto podría bastar para que los patos se desplazaran yéndose de lado y tener que realizar continuas correcciones (más que normalmente), y ya bastante limitados están como para encima meterles más fuentes de error. Además, al no coincidir los agujeros de la base con los de la placa (no sólo están desplazados como conjunto, sino también entre ellos), la placa quedaba forzada al montarla sobre la base. Así que la mejor opción era ponerle arreglo.
El primero, todavía inacabado, pero al que sólo le faltan unos detalles, ya se ve así.
Se puede ver que el sensor de distancia no está justo en el borde, sino que está tirando hacia dentro. De esta manera se evita un problema que tiene este sensor, y es que a distancias muy cortas (1 centímetro o así) deja de detectar. De esta manera, aunque el pato esté pegado a un objeto, el sensor seguirá detectándolo.
Y aquí una foto de la familia al completo.
Au, y por ahora ya está. A ver si para la semana que viene puedo tener dos más montados.

Y días más tarde recibimos las bases de madera.

Entre eso y todos los componentes que ya teníamos o que justo también acabamos de recibir ya podemos empezar a montar los patos definitivos.
Con las bases de madera hay que trabajar un poco, pero nada grave. Los agujeros que han hecho están desplazados, unos más y otros menos. En la siguiente foto se puede ver una mancha blanca (agujero que se ha tapado) y un agujero al lado en la posición buena.

El error de los agujeros no es muy grande (el de la foto es el que más, en los otros la diferencia es menos hasta solapar), pero es suficiente para hacer que la placa del circuito quede desplazada y rotada sobre la base de madera. Esto podría bastar para que los patos se desplazaran yéndose de lado y tener que realizar continuas correcciones (más que normalmente), y ya bastante limitados están como para encima meterles más fuentes de error. Además, al no coincidir los agujeros de la base con los de la placa (no sólo están desplazados como conjunto, sino también entre ellos), la placa quedaba forzada al montarla sobre la base. Así que la mejor opción era ponerle arreglo.
El primero, todavía inacabado, pero al que sólo le faltan unos detalles, ya se ve así.


Se puede ver que el sensor de distancia no está justo en el borde, sino que está tirando hacia dentro. De esta manera se evita un problema que tiene este sensor, y es que a distancias muy cortas (1 centímetro o así) deja de detectar. De esta manera, aunque el pato esté pegado a un objeto, el sensor seguirá detectándolo.
Y aquí una foto de la familia al completo.

Au, y por ahora ya está. A ver si para la semana que viene puedo tener dos más montados.
miércoles, 18 de junio de 2008
Hay alguien ahí?
Que tengo esto un poco (risas de fondo) abandonado.
Por dónde iba esto... Pues a ver, todo este tiempo he estado básicamente tocando temas de programación, temas poco vistosos como para comentarlos por aquí.
Este mes y medio se podría resumir en pruebas de comunicaciones, que no han resultado tan fáciles como en un principio había pensado, ya que de un problema saltábamos a otro; y modificar el comportamiento de los patos, haciéndolos algo más inteligentes, no en cuanto a reacción con el entorno, sino a la manera de relacionarse entre ellos.
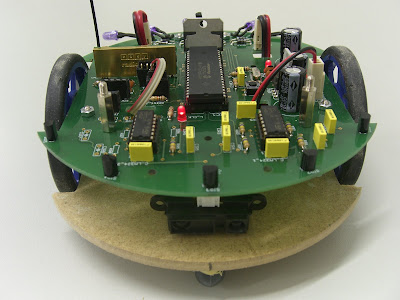
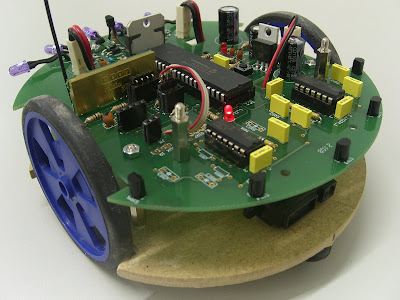
Físicamente poco ha variado el tema. El tercer pato ya está completamente montado (hace ya tiempo, pero no lo había puesto) y tiene una pinta así.
Los sensores de temperatura van cambiando del primer al tercer pato, según con cuál haga pruebas. Se puede ver también que los sensores de IR son diferentes a los que teníamos hasta ahora (bueno, se ve si os fijais). Llegó una partida de unos sensores diferentes a los que habíamos pedido (o hubo un error en el pedido, no sé, a mí sólo me va llegando material, y si se parece a lo que necesito, pues mejor), pero tras comprobar que funcionaban igual sin cambiar nada del circuito y que los valores que daban eran los mismos, los utilizamos sin problemas. Lo único, que el montaje cambia un poco, pero nada importante.
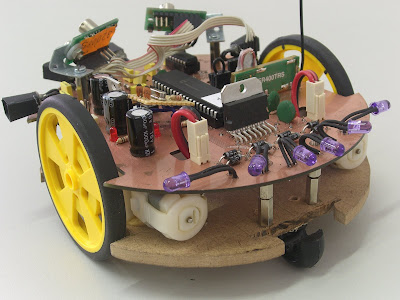
En esta segunda se puede ver la "nueva" instalación con 6 LEDs (recordemos que los anteriores sólo tenían 5). Era de esperar que funcionara correctamente, y de hecho funciona algo mejor que antes al ofrecer más superficie iluminada. Pero después de tener una época con problemas uno tras otro, el ver que un nuevo diseño funciona como toca hace soltar un suspiro de alivio (sobretodo pensando que ya se había mandado fabricar este nuevo diseño, y que si no funcionaba hubiera sido una cagada bastante gorda).
Se puede ver también que los LEDs son diferentes (por lo mismo que los sensores, un error en el envío, o en el pedido, o a saber). Estos son de color violeta (los anteriores eran completamente blancos) y al encenderse emiten un poco en luz visible a parte de en infrarrojo (los anteriores no había manera de ver si estaban encendidos o no a simple vista). Pero como con los sensores, al probarlos vimos que funcionaban igual de bien, lo único cambiar la resistencia de polarización, nada grave (que al final se ha quitado por un último cambio en el diseño, pero esto ya lo comentaré, que esto empieza a ser pesado).
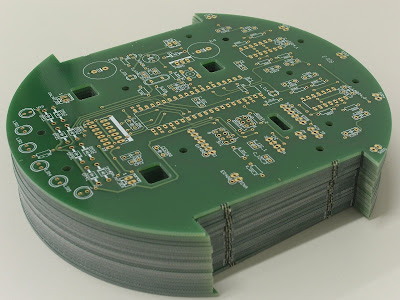
Y ya aprovechando esta entrada, aquí el regalito que me han traído hoy:
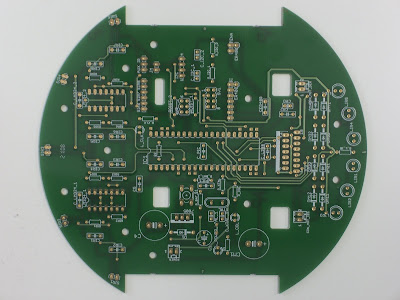
La placa definitiva donde se montara el circuito. Es igual que la última (casi, algún elemento movido y poco más), pero mucho más práctica a la hora de soldar componentes, tanto por el esmalte verde que impide que el estaño se vaya por donde no debe, como por las vías que comunican ambas caras, como por el serigrafiado que identifica dónde tiene que ir cada cosa.
Las bases de madera también están en camino, supongo que llegarán un día de estos. Así que en principio no tardareis mucho en ver ya una versión definitiva (esta vez sí) de cómo va a ser un pato.
Au, por hoy ya basta. A ver si para la próxima no me retraso tanto.
Por dónde iba esto... Pues a ver, todo este tiempo he estado básicamente tocando temas de programación, temas poco vistosos como para comentarlos por aquí.
Este mes y medio se podría resumir en pruebas de comunicaciones, que no han resultado tan fáciles como en un principio había pensado, ya que de un problema saltábamos a otro; y modificar el comportamiento de los patos, haciéndolos algo más inteligentes, no en cuanto a reacción con el entorno, sino a la manera de relacionarse entre ellos.
Físicamente poco ha variado el tema. El tercer pato ya está completamente montado (hace ya tiempo, pero no lo había puesto) y tiene una pinta así.

Los sensores de temperatura van cambiando del primer al tercer pato, según con cuál haga pruebas. Se puede ver también que los sensores de IR son diferentes a los que teníamos hasta ahora (bueno, se ve si os fijais). Llegó una partida de unos sensores diferentes a los que habíamos pedido (o hubo un error en el pedido, no sé, a mí sólo me va llegando material, y si se parece a lo que necesito, pues mejor), pero tras comprobar que funcionaban igual sin cambiar nada del circuito y que los valores que daban eran los mismos, los utilizamos sin problemas. Lo único, que el montaje cambia un poco, pero nada importante.

En esta segunda se puede ver la "nueva" instalación con 6 LEDs (recordemos que los anteriores sólo tenían 5). Era de esperar que funcionara correctamente, y de hecho funciona algo mejor que antes al ofrecer más superficie iluminada. Pero después de tener una época con problemas uno tras otro, el ver que un nuevo diseño funciona como toca hace soltar un suspiro de alivio (sobretodo pensando que ya se había mandado fabricar este nuevo diseño, y que si no funcionaba hubiera sido una cagada bastante gorda).
Se puede ver también que los LEDs son diferentes (por lo mismo que los sensores, un error en el envío, o en el pedido, o a saber). Estos son de color violeta (los anteriores eran completamente blancos) y al encenderse emiten un poco en luz visible a parte de en infrarrojo (los anteriores no había manera de ver si estaban encendidos o no a simple vista). Pero como con los sensores, al probarlos vimos que funcionaban igual de bien, lo único cambiar la resistencia de polarización, nada grave (que al final se ha quitado por un último cambio en el diseño, pero esto ya lo comentaré, que esto empieza a ser pesado).
Y ya aprovechando esta entrada, aquí el regalito que me han traído hoy:

La placa definitiva donde se montara el circuito. Es igual que la última (casi, algún elemento movido y poco más), pero mucho más práctica a la hora de soldar componentes, tanto por el esmalte verde que impide que el estaño se vaya por donde no debe, como por las vías que comunican ambas caras, como por el serigrafiado que identifica dónde tiene que ir cada cosa.
Las bases de madera también están en camino, supongo que llegarán un día de estos. Así que en principio no tardareis mucho en ver ya una versión definitiva (esta vez sí) de cómo va a ser un pato.
Au, por hoy ya basta. A ver si para la próxima no me retraso tanto.
viernes, 25 de abril de 2008
Y el tercer pato va mejorando
Bueno, eso de tercer pato... es una mezcla del primero, del segundo y de la base que hice para el tercero.
Be, aquí lo teneis tal y como está ahora.
Be, aquí lo teneis tal y como está ahora.

Los sensores de temperatura son los del primero, así que los voy cambiando según hago pruebas con uno o con otro. El PIC (el procesador) es el del segundo pato. De dos PICs que tenía, uno me falló, así que ahora tengo un único PIC, que voy cambiando de base según qué pruebas quiera hacer. Pero ahora mismo sólo puedo hacer pruebas de un único pato.
Probándolo como pato principal, siguiendo a una persona, se ha portado tal que así.
Que para las modificaciones que le he seguido haciendo en el comportamiento, me ha sorprendido incluso de lo bien que va.
Por cierto, a modo de curiosidad, para hacer el vídeo esta es la modificación que le he hecho para aguantar la cámaraeste es el engendro que ha llevado la cámara a la hora de hacer el vídeo.

Vamos, la cámnara va metida en el espacio que queda entre la placa y la base de madera. Pero después del vídeo ha recuperado su forma estilizada.
Au, a ver cuándo vuelvo a poder hacer pruebas con más de un pato.
sábado, 19 de abril de 2008
Así se mueve así así
Todavía no se puede probar el tercer pato en condiciones por falta de material, pero sí que se pueden ir haciendo pruebas por separado. Entre otras cosas se ha hecho ya la clásica prueba de controlar el pato por RF y ver cómo se portan los motores.
Aquí el resultado.
Aquí el resultado.
Y con la cámara encima para ofrecer una visión subjetiva.
Ale, esto es todo por hoy. A ver si la semana que viene os puedo enseñar cómo se coordinan entre ellos a la hora de moverse.
miércoles, 16 de abril de 2008
A punto de ser familia numerosa
Últimamente, entre otros temas, he estado metido en el diseño de otra nueva versión de un pato. "Otraaaaaaa???" Sí, otra, pero esta sí que sí parece que va a ser la definitiva.
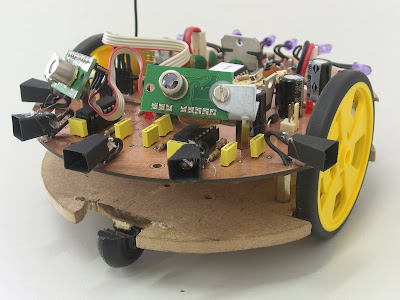
En este nuevo diseño ya se ha integrado toda la circuitería en la placa, han desaparecido casi por completo los cables (quedan los del sensor de distancia y los de los motores), y se ha vuelto a usar una base de madera para el pato para luego montar la placa encima.
La cosa empieza con algo así.
Esta es la nueva placa, donde irán montados todos los componentes
En este nuevo diseño ya se ha integrado toda la circuitería en la placa, han desaparecido casi por completo los cables (quedan los del sensor de distancia y los de los motores), y se ha vuelto a usar una base de madera para el pato para luego montar la placa encima.
La cosa empieza con algo así.
Esta es la nueva placa, donde irán montados todos los componentes
 Se mantiene el diseño circular y los cortes en las ruedas, y los sensores de IR ya se integran de forma fija en la placa. Los huecos para los sensores de distancia desaparecen, ya que se pueden montar apoyados sobre la base de madera, y así es más fácil hacer pruebas con ellos (montar uno delantero, uno delantero y trasero, dos delanteros...).
Se mantiene el diseño circular y los cortes en las ruedas, y los sensores de IR ya se integran de forma fija en la placa. Los huecos para los sensores de distancia desaparecen, ya que se pueden montar apoyados sobre la base de madera, y así es más fácil hacer pruebas con ellos (montar uno delantero, uno delantero y trasero, dos delanteros...).Como se va a volver a usar base de madera para montar los patos, se aprovecha la que ya teníamos de cuando se desmontó un pato para cambiarle la placa. Así ya nos podemos hacer una idea de cómo va a quedar.

La idea de volver a usar base de madera no me convencía demasiado. Pero la verdad es que mal aspecto no tiene, y es necesario para futuras ampliaciones de los patos (batería más grande, añadir circuito y mecanizado para que el pato se deje sobre una base de carga y alguna cosa más, que en principio no me tocará hacer a mí).
También podría suponer un punto negativo el tener que fabricar otras 18 bases de madera, pero finalmente es algo que tampoco voy a tener que hacer yo. Para realizar el proyecto al final me voy a limitar a fabricar 3 patos (o a lo sumo 4), y cumplir los objetivos de funcionamiento con este número limitado de patos. En un futuro, ya se encargarán de montar los que falten.
Para ver que la cosa ya empieza a ir en serio, aquí están la mayoría de los componentes que se usarán para montar los patos. Todavía faltan unos pocos, pero sirven para hacerse una idea.
Y así es como está el tercer pato por ahora. La parte delantera...
...y la parte trasera.
Está dividido en sectores claramente diferenciados. La parte frontal tiene la circuitería necesaria para gobernar los sensores de IR, la parte izquierda corresponde a la alimentación, la derecha comunicaciones, y la trasera motores y LEDs IR.
Como todavía faltan componentes por llegar, no está completo, pero poco le falta ya. Así como lleguen se podrá completar y poner en funcionamiento. Espero que sin problemas, que en los primeros tests que hice a medio montar ya tuve algunos pollos, unos debidos a unos cortocircuitos por un mal fresado de las pistas, y otros debidos a la combinación de un soldador y el pulso de cirujano que mis padres no me dieron.
Por cierto, no hay vídeo, pero parece que el segundo pato ya empieza a comportarse nuevamente. A ver cómo avanza estos días.
sábado, 12 de abril de 2008
No todo el monte es orégano
El segundo pato ha sufrido bastantes cambios de personalidad últimamente. Vamos, que le he cambiado la programación del comportamiento casi desde cero.
Cuando creía que ya podía funcionar de forma más o menos aceptable, hice el siguiente vídeo.
Cuando creía que ya podía funcionar de forma más o menos aceptable, hice el siguiente vídeo.
Ahora tiene una sencilla rutina de búsqueda, va caminando hasta que encuentra un obstáculo, y entonces gira (antes, si no veía al primer pato, simplemente se quedaba parado). Cuando ya encuentra al otro pato, entonces ya se pone a seguirle. En teoría, ya que después de los cambios todavía hay cosas que no funcionan. Si a eso le sumamos que el robot principal tenía la pila con poca carga, moviéndose o no según le pegaba, pues tenemos un bonito vídeo de cómo no tienen que funcionar las cosas.
Au, ríanse a gusto.
jueves, 10 de abril de 2008
Y estos son de verdad
Me envió mi prima Susana las fotos de lo que parecen ser unos patos bastante más organizados que los míos. Allá que van.


Gracias Su!
PD: Tengo esto un poco abandonado, pero en breve escribiré con noticias frescas.


Gracias Su!
PD: Tengo esto un poco abandonado, pero en breve escribiré con noticias frescas.
jueves, 6 de marzo de 2008
Formas y modales
los que va aprendiendo el Pato 2. Va bastante fino en su nueva base, que acabo de caer en que no puse fotos terminado de montar, así que allá van:



Bueno, le faltan los LEDs traseros, pero al no haber ningún pato más que le siga no son necesarios. Por lo demás es completamente funcional.
A lo que iba, que el Pato 2 aprende modales. Han sido varias las ocasiones en las que ha embestido al Pato 1 (no, no hay video, o al menos no lo encuentro). No sé si por amor, por odio, o por tonto, pero el caso es que no era una actitud nada deseable. Pero ahora ya se comporta como dios manda. Aquí lo podemos ver:
Ahora lleva implementado un CDV (jor, que bien suena eso), que no es más que un Control Dinámico de Velocidad (wow, así suena incluso mejor). Realmente es bastante sencillo.
A partir de los valores detectados por los sensores de IR se puede interpretar la distancia del pato. No se puede saber exáctamente la distancia, ya que este valor depende también de la iluminación ambiental y de cómo estén enfrentados los emisores y los receptores, pero sí que nos sirve para mantener un margen de seguridad. La solución es tan sencilla como hacer que si el valor está por debajo de un humbral (la distancia es grande) el pato acelere, si está dentro de un margen (la distancia es adecuada) la velocidad se mantenga, o si está por encima de otro humbral (la distancia es muy corta) la velocidad disminuya.
De esta manera conseguimos que el Pato 2 se mantenga a una distancia adecuada siguiendo al Pato 1 y no tener que estar tan pendientes de las diferencias de velocidades de los motores entre patos.
Una futura posibilidad más elegante sería hacer que si el pato está lejos, pero al acelerar ya se está acercando, dejara de acelerar (con el sistema actual sigue acelerando hasta una velocidad máxima). Pero como la velocidad se actualiza bastante rápido y no se ha detectado ningún problema en las pruebas de hoy, por ahora se va a quedar así.
viernes, 29 de febrero de 2008
Lo que nos vamos a reír
Antes que nada, sigo vivo. Este tiempo he estado haciendo diferentes pruebas. Que si calibrando la velocidad de los motores del nuevo pato, concordar velocidades entre ellos, pruebas sobretodo de comunicación vía radio y alguna cosa más. Pero nada que haya supuesto un gran cambio.
Pero el otro día me viene el tutor, y me comenta que la placa de control (la que lleva el PIC y la mayor parte de la circuitería) se podría modificar para ajustarla a nuestras necesidades, quitarle partes que no usamos y cosas así.
Por una parte bien, la podré dejar a mi gusto y la podré aprovechar mejor. Pero por otra parte va a ser un tema que me va a complicar un poco, no mucho, pero sí lo suficiente como para echar unas gotas de sudor.
Voy a explicar un poco como va el tema de montar los circuitos en placa para que me entendáis. Una placa normalmente (y para simplificar las cosas) tiene dos capas: la capa superior o de componentes, y la capa inferior o de soldadura. Los nombres son bastante descriptivos. En la capa superior es donde se depositan los componentes, y por la capa inferior es donde se hacen las soldaduras para unir los componentes a la placa y a las pistas.
Hacer el montaje es bastante sencillo, se meten las patillas de los componentes por los agujeros hechos en la placa (por la parte de arriba), y se aplica soldador y estaño en cada patilla (por la parte de abajo). Este método es bastante sencillo, al aplicar las soldaduras por la capa donde no hay nada que moleste hace que la tarea sea bastante fácil. Pero esto sólo se puede hacer así en placas fabricadas de forma profesional (por llamarlo de alguna manera). Una como esta:
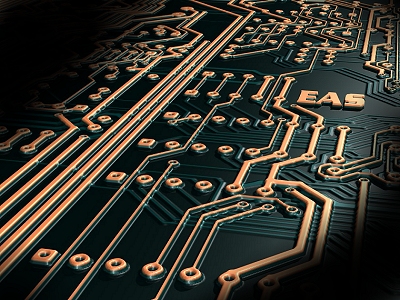
En este tipo de placas, las pistas que van por la cara superior y a través de un agujero pasan a la capa inferior, están completamente conectadas. El agujero está recubierto interiormente por material conductor.

Esto hace que una pista tenga continuidad aunque pase de una capa a otra. Además, al realizar la soldadura, permite que el estaño fundido pase de una capa a otra a través del agujero creando una soldadura de mejor calidad.
Hasta ahí bien.
En el caso de los patos, para hacer prototipos, usamos otro tipo de placas. Se coge una placa virgen de fibra de vidrio recubierta de cobre por los dos lados (como si cogiérais un trozo de cartón y lo pintáseis primero por un lado y después por el otro). Esta placa se coloca en una fresadora, y ésta dibuja el circuito cortando cobre. Algo parecido a ésto:
Al acabar con una cara, hay que darle la vuelta a la placa y repetir por la otra cara (si el circuito tiene pistas por las dos caras).
Con este tipo de placas, no existe continuidad en una misma pista que pasa de una capa a la otra. Sólo hay conductor en la superficie de la placa, no dentro de los agujeros. Esto hace que si una patilla tiene la pista asociada en la cara superior, haya que soldar por esa misma cara. Si tiene la pista asociada en la cara inferior, pues lo mismo. Y si tiene pista en ambas caras, hay que realizar dos soldaduras. Por la cara inferior sigue siendo igual de fácil hacer una soldadura, no hay ningún problema. El problema está en la cara superior. Cuando ya tienes varios componentes, se empieza a hacer difícil meter la punta del soldador para soldar con comodidad, y en componentes que van a ras de circuito (como por ejemplo conectores) es literalmente imposible soldar por la cara superior, al quedar la patilla escondida bajo el aislante del mismo componente. En estos últimos casos se puede desmontar, soldarlo como toca, y volver a montarlo una vez ya soldado.
Otro inconveniente que tienen este tipo de placas es si tienes que corregir errores y realizar dessoldaduras. En una placa convencional, aplicas el dessoldador por la capa inferior, se calienta todo el estaño y lo retiras con la bomba de succión, que encaja perfectamente en la patilla (el dessoldador no es más que un soldador con un agujero en la punta para encajar en la patilla y por donde se retira el estaño fundido). En nuestro caso, no basta con aplicar el dessoldador por la cara inferior, sino que también lo tenemos que hacer por la superior, y ahí el dessoldador ya no sirve, ya que no se puede colocar de manera que funda y retire el estaño a la vez. Ahí ya depende un poco de como sea el componente a cambiar y de la facilidad de acceso que haya para hacerlo de una manera o de otra. Sin contar que el cobre no tiene una fijación muy resistente a la placa de fibra, y es posible que al retirar componentes se levante parte de la pista, teniendo que solucionarlo con alguna chapuza.
Y hasta aquí el lloro de hoy.
miércoles, 6 de febrero de 2008
Y otro más
Vengaaaaaaa, que salen como churrooooooos!
Aquí tenéis al próximo en la familia. Poco le falta para empezar a andar. Aunque su hermano está haciendo de donante. Como todavía estamos en pruebas, y no tengo material para fabricar más patos, he usado partes del segundo pato para ir montando éste.
Aquí tenéis al próximo en la familia. Poco le falta para empezar a andar. Aunque su hermano está haciendo de donante. Como todavía estamos en pruebas, y no tengo material para fabricar más patos, he usado partes del segundo pato para ir montando éste.

 Bonito verdad?
Bonito verdad?Y aquí el circuito final que me permite comunicarme desde el PC con los patos. Ahora sólo me sirve para controlarlos, pero para cuando se comuniquen entre ellos, me servirá para ver qué se dicen, y si es necesario para controlar alguno de forma manual.

Ale, hasta la semana que viene, que me voy de fiesta por el norte.
martes, 5 de febrero de 2008
Esto empieza a parecer algo serio
Ayer me hicieron las placas que comentaba el otro día (el otro día de payés). Aquí está el resultado.
Esta primera es la que me sirve de enlace entre el PC y el pato. Ya está montada y funcionando.
Esta primera es la que me sirve de enlace entre el PC y el pato. Ya está montada y funcionando.

Aquí están las miniplaquitas que sirven de soporte para los receptores de IR. Esta vez el sistema para facilitar el corte sí ha funcionado.

Y por último la base de los futuros patos, con más que buena pinta, y que espero de buenos resultados.

Au.
sábado, 2 de febrero de 2008
Primeras pruebas de radio
A ver, que últimamente tengo esto bastante olvidado. Os presento al nuevo objeto de estudio, el ER400TRS.

Básicamente es un conversor de medios. Lo que le llega por cable mediante RS-232 lo transmite directamente, y cualquier otro ER400TRS que esté dentro del rango lo recibe y lo transmite por RS-232 al dispositivo al que esté conectado. Aquí podeis ver el datasheet.
La primera prueba ha consistido en poner un enlace RF en uno de los patos y programarlo para que sea completamente tonto. Antes no es que fueran muy listos, pero al menos tenían iniciativa. Para la prueba está programado para recibir y ejecutar órdenes. El otro enlace RF se ha puesto en el ordenador, y desde éste se mandan las órdenes.
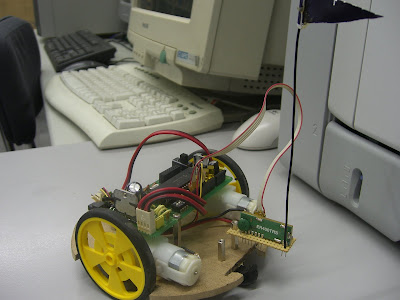
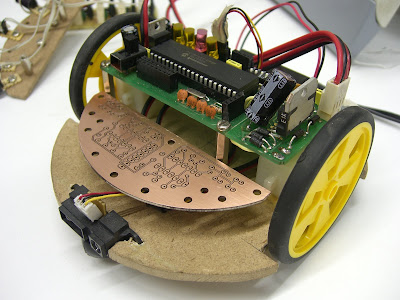
Esto es una versión provisional para hacer pruebas, no tiene ni sensores de IR, ni de temperatura ni tiene los LEDs traseros. Sí conserva el sensor de distancia, por si acaso. La antena es de diseño propio xD. Se puede mejorar bastante el diseño de la antena, haciéndola integrada con la placa de la circuitería, pero por ahora va a seguir así.
En el siguiente vídeo se puede ver el pato controlado desde el ordenador. Mucho interés no tiene, ya que simplemente se ve al pato dando vueltas. El modo de control es bastante sencillo, simplemente se envía un carácter al pato y éste se mueve de una u otra manera. Los carácteres usados han sido:
QWE
ASD
ZXC
W y X hacen avanzar o retroceder al pato. S lo detiene. A y D hacen que gire sobre sí mismo, moviendo las ruedas a la misma velocidad pero en sentidos diferentes. Q, E, Z y C hacen que gire sobre una rueda hacia adelante o hacia atrás. Todo bastante sencillo.
Au, por hoy ya basta.
domingo, 20 de enero de 2008
Preparando nuevos juguetes
Esta semana ha sido de poca actividad en laboratorio. Sólo hoy he subido a hacer algunas pruebas. Los demás días me los he pasado pintando como un niño de 4 años, literalmente, porque lo que he hecho no son más que garabatos.

Esto de aquí arriba es lo que puede ser una nueva generación de patos (o degeneración, a saber). Es lo que avancé un poco en la anterior entrada, el diseño de una placa de circuito integrado con la forma de la base del pato. Si finalmente funciona, sólo faltaría montar encima la placa de la circuitería del procesador. Ya me pensaré en un futuro si la llego a integrar del todo en la misma base, sería lo suyo.
Las ventajas que tendría si esto llega a funcionar (si la máquina que crea las placas no pone problemas, a ver si para la próxima le hago un vídeo, que es algo curioso) son bastante importantes:
- El que el proceso de fabricación de la base esté automatizado me quita mucho trabajo. El dibujar, cortar y taladrar la base en madera, quieras o no, quita bastante tiempo.
- Los patos tendrán todos la misma forma y medidas. En principio es algo que ya debería ser así desde un principio, pero el trabajar en madera sin herramientas adecuadas, pues como que produce desviaciones en el resultado.
- El tener el circuito integrado en la misma base hace que todo el mecanizado sea mucho más limpio.
- En principio deberían ser bastante más ligeros, y traducirse en una mayor agilidad de movimientos y mayor vida de la batería.
- Y la última ventaja, y la más importante, es que mis compañeros de laboratorio dejarán de tener esa mirada asesina que ponen cuando no dejo de hacer ruido y suciedad en mis trabajos de marquetería. Que al principio era hasta divertido ver como se inquietaban, al cabo de un tiempo empezó a ser preocupante, y cuando ví que trajeron hachas cuando para sus proyectos no hacían falta empecé a sospechar de oscuras intenciones.
Como desventaja, que al ser todo tan integrado, si falla algo y me cargo alguna pista o contacto, quizás deje la placa para tirar (es bastante fácil llevarse por delante una pista al dessoldar un componente).
Aquí un par de "fotos" con mayor detalle. Esta es la mitad frontal, no cambia demasiado respecto al circuito de corte circular de la otra entrada.
Y esta es la mitad trasera, con la parte correspondiente a los LEDs de IR, y una nueva parte que se añade a la colección, que es el soporte de RadioFrecuencia (RF). Así es, en breve espero empezar a hacer pruebas de RF a ver que tal se portan los patos recibiendo órdenes y dando información a un dispositivo remoto (ya sea yo con el ordenador u otro pato).
Y esto es otro nuevo juguete que tengo preparado, que no es más que un interfar RF para el ordenador, para poder hacer pruebas con los patos directamente. En principio el poner RF en los patos es sólo para que se comuniquen entre ellos, pero de cara a empezar las pruebas, es mucho mejor hacerlas desde el ordenador, así puedo enviar órdenes manualmente y ver exáctamente qué datos envían los patos. De cara a depurar el sistema es muy aconsejable. Una vez que vea que funciona correctamente, ya haré que se comuniquen entre ellos.
Au, y esto es todo por hoy.
viernes, 11 de enero de 2008
Menos artesanal, pero ha ganado mucho
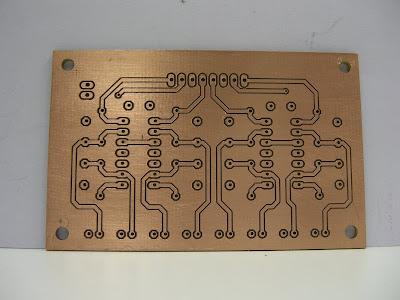
Ya tengo las placas que diseñé en fiestas. La verdad es que han quedado muy bien. Aquí están.
Esta es una versión de la placa para la circuitería de les sensores de IR. Finalmente no creo que vaya montada, pero de cara a hacer pruebas puede ir bien.
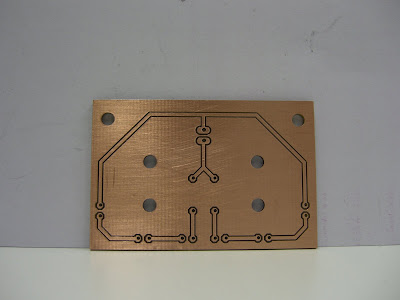
Esta es la placa de LEDs de IR. Simple como ella sola. Se puede montar, pero sufrirá algunas modificaciones (si finalmente no hago algo que tengo pensado y que ahora explico) como separar los agujeros de la tornillería para poder meter la pila por debajo, o redondearla un poco para hacerla más estética.
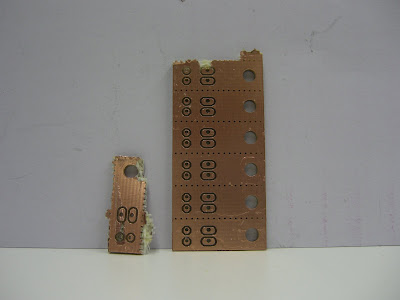
De esta placa no comenté nada. Es simplemente el soporte para los sensores de IR, los que llevan los capuchones. El que haya muchos juntos y repetidos, es porque la máquina no puede hacer placas muy pequeñas (lleva un aspirador en el mismo cabezal que agujerea, traza y corta, y si las placas son pequeñas se las lleva al cortarlas, y después hay que hurgar en el depósito del aspirador). Las filas horizontales de puntos son agujeros, que en principio deberían haberme servido para poder recortar las placas con mayor facilidad, pero se puede observar en la foto que no acaba de ir bien el sistema :D. En la próxima versión ya haré agujeros más grandes, que quede mucho menos material entre ellos.
Y aquí la joya de la corona. Lo que yo creía que iba a ser una idea de bombero, al final tiene una pinta estupenda. Es otra versión de la placa de la circuitería para los sensores de IR. El que se puedan hacer diferentes formas de placas, me abre un montón de posibilidades de cara a fabricar las piezas de los futuros patos.

Aquí la placa está sin montar, pero es una pequeña muestra de cómo queda. Bastante más elegante y discreto que no el montaje anterior.
El siguiente paso al ver las posibilidades en la creación de placas, es el de fabricar la base del pato directamente como una placa de circuitos y no una base en madera. De esta manera, simplemente tendría que "dibujar" la forma de la base, con los agujeros para los sensores, las ruedas, la tornillería, la circuitería ya integrada en la misma base... y el montaje de los futuros patos se simplificaría bastante, además de tener un aspecto mucho más elaborado. Ya veremos dónde acaba esta idea.
Esta es una versión de la placa para la circuitería de les sensores de IR. Finalmente no creo que vaya montada, pero de cara a hacer pruebas puede ir bien.

Esta es la placa de LEDs de IR. Simple como ella sola. Se puede montar, pero sufrirá algunas modificaciones (si finalmente no hago algo que tengo pensado y que ahora explico) como separar los agujeros de la tornillería para poder meter la pila por debajo, o redondearla un poco para hacerla más estética.

De esta placa no comenté nada. Es simplemente el soporte para los sensores de IR, los que llevan los capuchones. El que haya muchos juntos y repetidos, es porque la máquina no puede hacer placas muy pequeñas (lleva un aspirador en el mismo cabezal que agujerea, traza y corta, y si las placas son pequeñas se las lleva al cortarlas, y después hay que hurgar en el depósito del aspirador). Las filas horizontales de puntos son agujeros, que en principio deberían haberme servido para poder recortar las placas con mayor facilidad, pero se puede observar en la foto que no acaba de ir bien el sistema :D. En la próxima versión ya haré agujeros más grandes, que quede mucho menos material entre ellos.

Y aquí la joya de la corona. Lo que yo creía que iba a ser una idea de bombero, al final tiene una pinta estupenda. Es otra versión de la placa de la circuitería para los sensores de IR. El que se puedan hacer diferentes formas de placas, me abre un montón de posibilidades de cara a fabricar las piezas de los futuros patos.

Aquí la placa está sin montar, pero es una pequeña muestra de cómo queda. Bastante más elegante y discreto que no el montaje anterior.

El siguiente paso al ver las posibilidades en la creación de placas, es el de fabricar la base del pato directamente como una placa de circuitos y no una base en madera. De esta manera, simplemente tendría que "dibujar" la forma de la base, con los agujeros para los sensores, las ruedas, la tornillería, la circuitería ya integrada en la misma base... y el montaje de los futuros patos se simplificaría bastante, además de tener un aspecto mucho más elaborado. Ya veremos dónde acaba esta idea.
Suscribirse a:
Entradas (Atom)