Al no poder trabajar directamente con los patos estos días (aunque hubiera sido interesante cogerlos sólo por ver la cara de los seguratas en los arcos de seguridad del aeropuerto), me he dedicado un poco a rediseñar los circuitos de los emisores y de los receptores de IR. A falta de unas pequeñas modificaciones que se me puedan ocurrir estos días, serán algo parecido a esto.
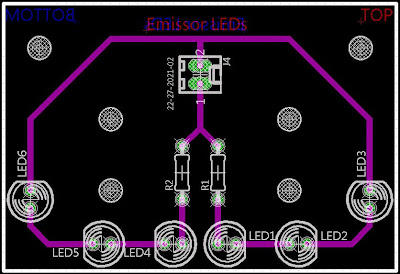
Éste se corresponde a la placa de los LEDs.
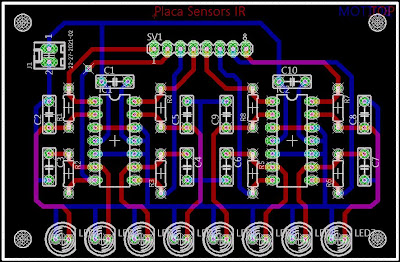
Y este otro se corresponde a la placa de los receptores.
Para explicarlo un poco a los que no hayan visto uno de éstos en su vida, aclarar que es un esquema físico de cómo será la placa de circuitos y de dónde irán montados los componentes. En este esquema se definen las pistas, los agujeros, los contactos y después una máquina ya se lo monta para darte una placa sobre la que montar los componentes.
Las líneas rojas son las pistas que van en la cara superior de la placa (donde se montarán los componentes) las líneas azules son las pistas de la cara inferior, y las figuras blancas son los componentes y agujeros. Realmente es más complejo que eso, pero así a lo ganso sirve para explicarlo un poco. Las líneas moradas significan que por ahí hay pista en la cara superior e inferior.
Algunos detalles a comentar.
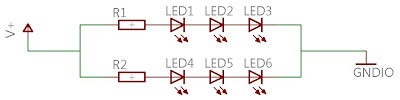
La placa de LEDs tiene 6 LEDs en lugar de 5. Al final creo que me decido por un montaje de 6 LEDs. Por motivos de voltaje, no puedo poner más de 4 LEDs en serie, si quiero poner más debo poner grupos en paralelo. Esto es porque en cada LED debe haber una caída de tensión de 1'25V (para funcionar como toca, por encima se puede quemar y por debajo no funcionar), y la alimentación que da la placa es de 5V. Si montara más de 4 en serie, iluminarían menos de lo debido. La siguiente opción (que es como están ahora) es poner dos grupos en paralelo de LEDs en serie, un grupo de 3 y otro de 2. Con una imagen quedará más claro.
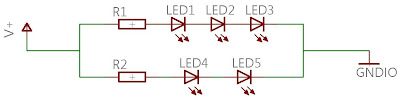
Para cada grupo necesitaría una resistencia concreta de polarización, para conseguir la caída de tensión necesaria en los LEDs. Como conseguir un valor determinado de resistencia puede no ser tan trivial, puede pasar que un grupo de LEDs alumbre un poco más o menos que el otro, dando lecturas erróneas al pato que va detrás. Usando dos grupos de LEDs iguales, se ponen resistencias de polarización de igual valor, y la posible diferencia se reduce a las tolerancias de fabricación que tengan las resistencias y los LEDs.
Otra posible solución sería seguir teniendo 5 LEDs, pero intercalando su montaje. Es decir, que los de los extremos y el central fueran de un grupo, y los otros 2 LEDs fueran del otro grupo. De esta manera, aún habiendo diferencias de emisión entre LEDs de diferente grupo, esta sería simétrica en el abanico que formaran. Si no me convence el montaje de 6 LEDs quizás la tenga en cuenta.
Otro motivo para poner 6 LEDs, es que dejaré 2 LEDs centrados en la parte trasera, y los 4 restantes los dejaré como están montados ahora. De esta manera, tendré un montaje equivalente al de ahora, pero con un LED central el doble de brillante. A falta de hacer pruebas, creo que esto puede mejorar el seguimiento de los patos.
En cuanto a la placa de los sensores de IR, se puede observar que hay sitio para 8 sensores, cuando se comentó que en principio con 5 bastaría. Por ahora no he cambiado de idea, seguiré trabajando con 5. Uno de los motivos del cambio de placa fue montar un integrado que tuviera la mayor cantidad posible de amplificadores operacionales (para tratar la señal que devuelve el sensor de IR, desde ahora en adelante AO). Sólo lo he encontrado de 4, pero ya es mejor que no tener 8 integrados individuales cada uno con su alimentación. Al necesitar para un mínimo de 5 sensores, prefiero montar 2 integrados de 4 cada uno, que no 1 de 4 y otro de 1. De esta manera, puedo seguir trabajando con 5 sensores, y si al final me decido por ampliar el montaje, la parte de la circuiteria ya la tengo resuelta. Además, de esta manera tengo AO de reserva por si falla alguno (ya me ha pasado) en el mismo circuito.
Quería hacer una explicación lo más sencilla posible y al final no sé si voy a liar al personal. Ale, cierro el chiringuito por hoy.
Edito
Pues no, no cierro todavía por hoy, que parece que estoy inspirado. Posible modificación de la placa de sensores.
Más compacta, con la forma ya adecuada para que quede integrada con el pato, y con soporte para poder anclar los sensores en la misma placa. Son 12 los agujeros que se pueden contar, 9 en la periferia y otros 3 para el anclaje de la placa al pato. El hecho de que haya 9 agujeros para los sensores, es simplemente para tener facilidad a la hora de modificar su posición, no es que haya vuelto a cambiar de idea y ahora quiera poner 9 sensores. El problema es que no lo podré probar hasta pasado reyes, así que estaremos con la duda de si funciona o no hasta entonces.
Ale, ahora sí.




