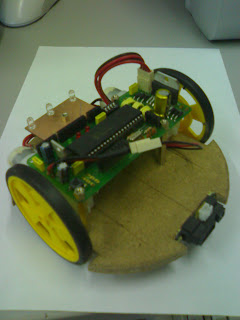
Aquí está el pato en cuestión en todo su esplendor. Hermoso, no? xD
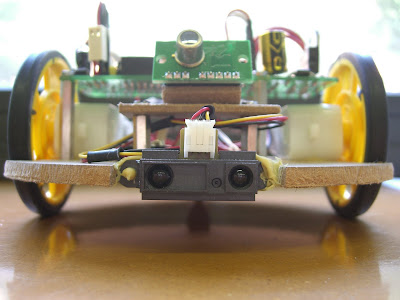
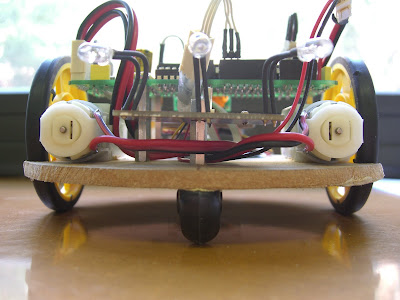
- Vista frontal. La cosa negra que tiene delante del todo es un sensor de distancia bastante básico. Permite saber si tiene por delante un objeto a menos de 25cm, pero no permite saber su distancia exacta. Por detrás de 25cm no detecta.
- Vista lateral. Se puede apreciar que las ruedas que monta son enormes para lo enano que es. Ya va bien, será poco sensible a irregularidades del suelo (dentro de unos límites, claro) y tendrá buena tracción.
- Vista trasera. Poco a detallar. En la parte baja se ve una falsa rueda. No es más que un pegote de plástico para mantener el equilibrio, y en principio no dificultará el movimiento, pero la idea es poner una rueda loca, aunque todavía no he encontrado ninguna lo suficientemente pequeña.
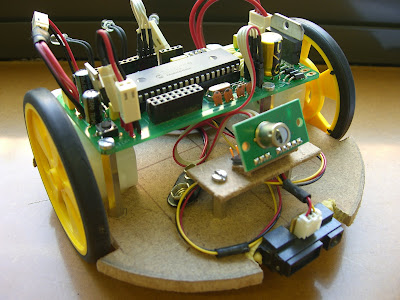
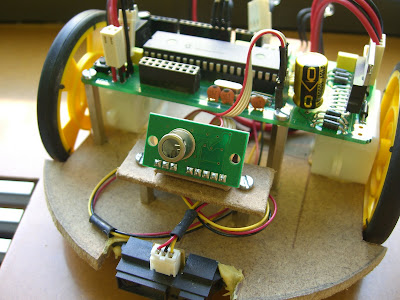
- En esta imagen se puede ver el sensor de temperatura (sólo lo llevará instalado este pato). Es la placa pequeña con el espejo redondo. Es un sensor que da un barrido de 8 lecturas de izquierda a derecha (sobre un arco de 41º). Gracias a este sensor el pato será capaz de seguir a una persona por su calor corporal.
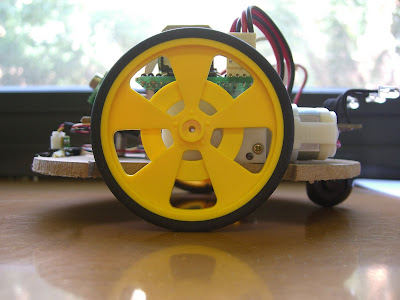
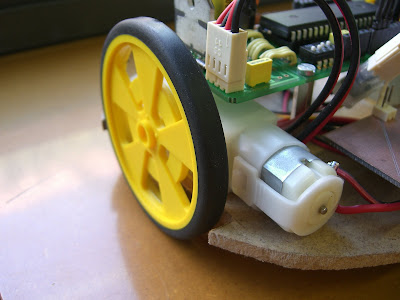
- Detalle del motor con la rueda. Tampoco no hay mucho más que decir. Lo blanco tiene un hierro que gira, y éste hace que gire lo amarillo. Fácil.
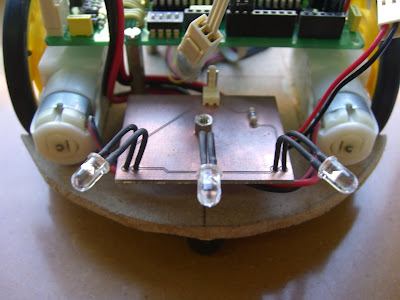
- Placa de LEDs. Son tres LEDs infrarojos para señalizar. Los demás patos (cuando estén)tendrán que ser capaces de verlas y usarlas para seguirse entre ellos.
- Y la chicha del pato, la placa de control. Donde se recogen las señales de los sensores, se tratan, y se reacciona según el entorno. Aquí se puede decir que está casi todo el trabajo que se tiene que hacer.
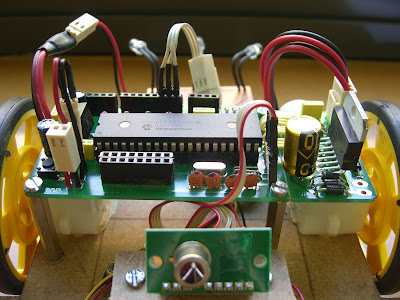
Todavía tiene que sufrir alguna otra modificación, pero tal y como está empieza a parecerse a lo que acabará siendo definitivamente.